Wi-Fi машинка с камерой своими руками
2019-01-11, Владимир21


Идея простая, мы хотим, чтобы машинка подключалась к домашнему роутеру и могла управляться со смартфона из любой точки планеты где есть интернет. Причем не просто управлялась, а еще транслировала видео с бортовой камеры в реальном времени, а может ещё и звук.

Закупаться с компонентами будем конечно же на Алиэкспресс. Список необходимы компонентов найдете на странице проекта.

Это кусок оргстекла, 2 мотора и колеса. По-хорошему, такой проект делается на Raspberry Pi, к которой также нужно докупить камеру и драйверы для управления моторами.
Ну и само собой, придется потратить кучу времени на настройку и написание скриптов под саму Raspberry и еще столько же на разработку «веб морды», с которой все будет управляться. Не так давно автор делал довольно интересный проект с использованием вот такой IP камеры.
Сама камера очень клевая, поворачивается по 2-ум осям, имеет очень большую зону обзора (практически полную сферу), позволяет записывать видео на карту памяти с разрешением 720p, имеет полноценный режим ночного видения с инфракрасной подсветкой, а также у нее есть режим «радио-няня», то есть, помимо наблюдения в реальном времени, можно говорить и слушать из любой точки земного шара соответственно. Ну и собственно эта камера полностью заменит нам Raspberry Pi и ее камеру, и стоит она значительно дешевле. Также у этой камеры уже есть готовое приложение для управления всей кучей ее функций, и ничего нового разрабатывать не придется, остается только сделать так, чтобы при управлении со смартфона мы могли управлять не поворотом камеры, а движением колесной платформы.
Используя родное приложение камеры, двигаться мы сможем пошагово, чуть проехали, повернули, поехали дальше. Не очень впечатляет, но это плата за простоту и доступность.

Голову камеры поворачивают 2 невероятно медленных шаговых моторчика без концевиков. Поэтому сразу после включения, камера вслепую определяет свое положение весьма интересным способом: крутится до упора в одну сторону и продолжает пытаться крутится еще какое-то время чтобы голова камеры точно повернулась максимально в край. То есть, сигнал на мотор идет, он пытается крутится, но конструкция не дает ему повернуться дальше. Затем голова двигается в противоположный край, потом встает по центру и то же самое делает с вертикальной осью, то есть, поворачивается вниз и продолжает пытаться повернуть.

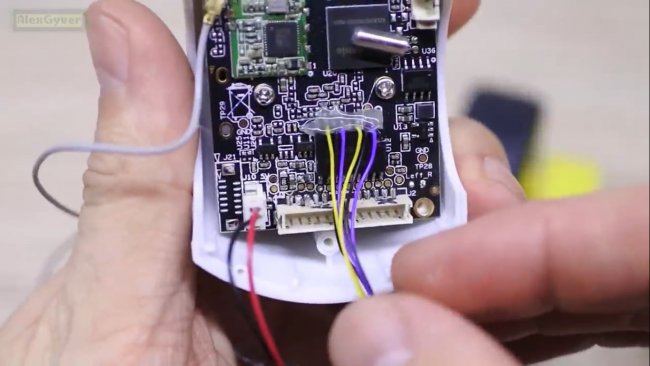
То есть, таким весьма топорным способом, камера определяет нули положения головы. И вот теперь мы можем ею управлять со смартфона, но тут тоже есть любопытный момент. В правом крайнем положении, которое мы назвали нулем, сигнал на мотор продолжает поступать. То есть, мотор пытается крутиться несмотря на то, что ему просто некуда. А вот в левом положении сигнал уже не поступает, то есть, контроллер мотора знает насколько повернулся мотор и не дает ему крутиться дальше. И вот эта недоработка китайцев поможет нам дальше. Давайте уже наконец разберем камеру.

Отключаем все, чтобы вытащить голову с платой.

Нет, эти моторы для движения использовать не получится, так как они ну очень медленные. Так что за скорость будут отвечать коллекторные моторы с колесами. Теперь давайте соберем китайскую колесную платформу.

Крепим моторы вместе с креплениями. И вот здесь желательно подлить немного горячего клея, иначе моторы шатаются. Сажаем колеса на оси и машина готова.

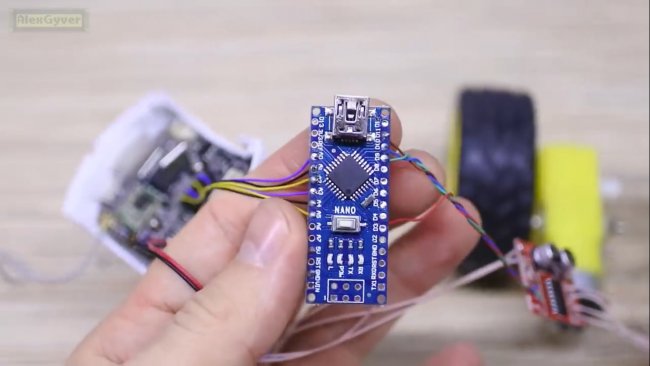
Теперь нам нужно придумать, как передать сигналы управления шаговыми движками на коллекторные. Автор не нашел более удобного и гибкого способа, чем использовать платформу arduino.

Она позволит управлять скоростями и временными задержками, что очень удобно. Аrduino nano прибавит к бюджету проекта стоимость одной шаурмы в Москве, или шавермы, если вы из Питера.
Типичный сигнал шаговика выглядит вот так:

Автор подключил все 5 проводов к arduino и решил в цифровом виде посмотреть состояние контактов. И что вы думаете, закономерность переключения контактов отлично прослеживалась и можно было без проблем ее распознать, чтобы определить направление вращения мотора.

Оставим 3 провода с каждого мотора, этого будет более чем достаточно. Будем рассматривать вот такое состояние контактов, потому что при изменении его в любую сторону будет понятно, в какую сторону камера хочет вращать мотор.


Самое сложное позади, осталось подключить моторы с драйверами в единую схему и машинка готова. Собственно, для тех, кто захочет повторить проект, вот схема подключения компонентов:
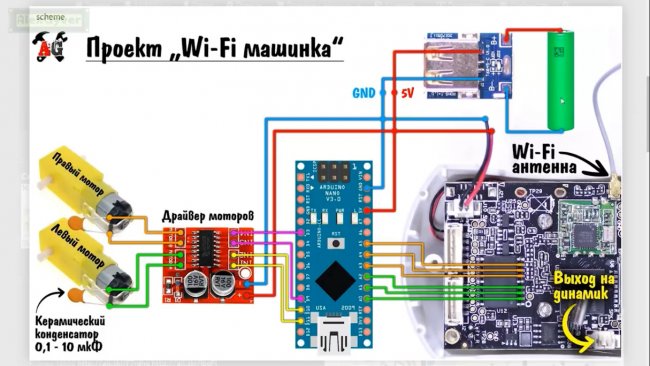
Запаиваем схему. Паяем аккуратно, чтобы нигде не было «соплей». Самое главное, не допустить их при пайке проводов к драйверу шаговиков. Для надежности также заливаем всё термоклеем.

Конденсаторы на моторах необязательны, но без них может глючить, автор не проверял, но вероятность весьма высокая.

Далее, по инструкции на сайте загружаем в arduino прошивку, которая будет получать сигналы от драйверов и вращать наши моторчики.
Перед загрузкой прошивки можно настроить некоторые параметры, такие как: скорость в разных режимах и тайм-ауты.
Собираем бутерброд из плат, прокладывая каждый слой двухсторонним скотчем. Можно также горячего клея подлить.

Выводим все провода и питание как на схеме и собираем камеру. Провода пропускаем через стойку камеры.

Для первого теста автор подключил powerbank. Подключаемся.

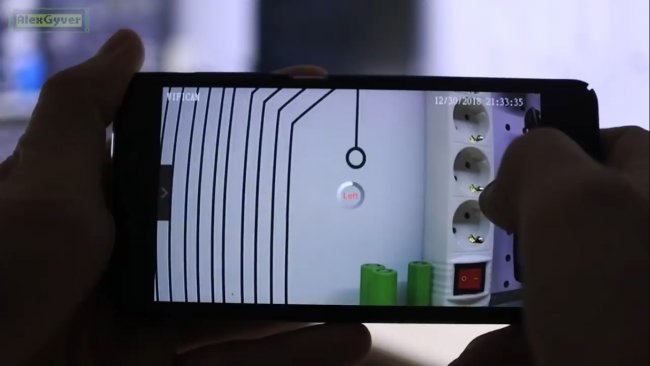
Ну что ж, все работает отлично. Собственно, все работает так, как и должно работать, может даже чуточку лучше. Единственное, что powerbank все-таки тяжеловат, к тому же автор планировал сделать базу для подзарядки машинки, так что будем использовать 1 литиевый аккумулятор и вот такой модуль, который защищает аккумулятор от переразряда, умеет заряжать его от usb и повышает напряжение до 5В, позволяя снять максимальный ток в районе 500мА, нам этого вполне хватит.

От модуля автор отпаял usb разъем, и на всякий случай повесил конденсатор на выход линии 5В для фильтрации помех от преобразователя.
И собственно от него же пойдут провода 5-вольтовой линии питания всех остальных компонентов. Родные крепежные отверстия камеры идеально подошли под прорези на корпусе платформы, так что крепим. Осталось закрепить батарейный отсек, также закрепляем антенны и камеру. Автор зафиксировал ее резиночкой. Это «колхозно», но весьма надежно и позволяет настроить угол камеры над горизонтом.

Все, готова наша IP-машинка. Аккумулятора хватит в лучшем случае на 6 часов. Это если чередовать движение и просто наблюдение через камеру. Так что идея такая: у машинки должна быть база, находясь на которой, она заряжается.

На этой машинка можно неспешно катать по квартире, наблюдать, например, за домашними животными и даже с ними играть, находясь в любом месте на планете где есть интернет. Главная фишка этой схемы в ее доступности и дешевизне.
Благодарю за внимание. До новых встреч!
Видео:
Этот пост может содержать партнерские ссылки. Это означает, что я зарабатываю небольшую комиссию за ссылки, используемые без каких-либо дополнительных затрат для вас. Дополнительную информацию смотрите в моей политике конфиденциальности.
Информация
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.