


Этот танк не первая сборка мастера. Отличительной особенностью именно этой модели является пружинная подвеска, оснащение модели двигателем, ремонтнопригодность.
Давайте посмотрим демонстрационный ролик.
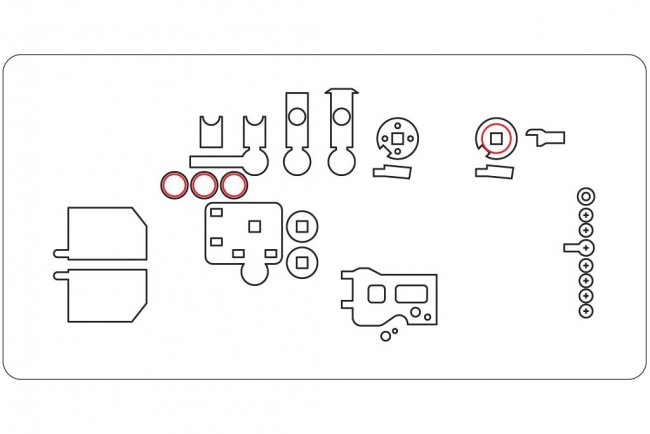
Детали корпуса вырезаются на лазерном резаке, а файлы доступны по этой ссылке.
Кроме деталей корпуса понадобятся следующие
Инструменты и материалы:
-Винты Ø 3 мм:
-14 шт длиной 15 мм,
-10 шт длиной 25 мм,
-10 шт длиной 30 мм.
-Трубки x20 Ø4 мм (Ø3 мм внутренний диаметр);
-Металлическая проволока Ø 1 мм;
-Ø3 мм резьбовой стержень;
-Пружины для подвесок Ø 4,5 мм и длиной 30 мм -10 шт;
-Винты M4 2 шт;
-Зубочистки;
-Макетная плата;
-Микроконтроллер ESP8266;
-Соединительные провода;
-Двигатель 28BYJ-48 с платой управления - 2 шт;
-Батарея 5 В;
Шаг первый: обзор
В этом шаге мастер предоставляет на обозрения свою модель танка, а также указывает ссылку на сайт, на котором можно посмотреть танк в разобранном виде.


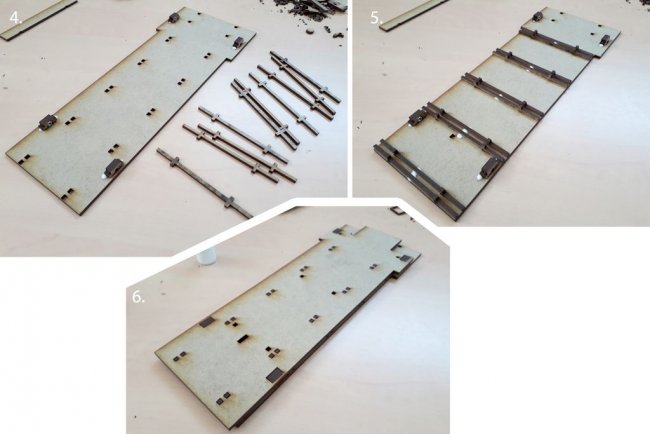
Шаг второй: днище
Мастер начинает сборку с днища танка. Устанавливает гайки в крепления. Устанавливает крепление по бокам днища. Устанавливает опоры. Устанавливает второй слой.


Шаг третий: корпус
Начинает сборку корпуса. Собирает радиатор и заднюю часть.
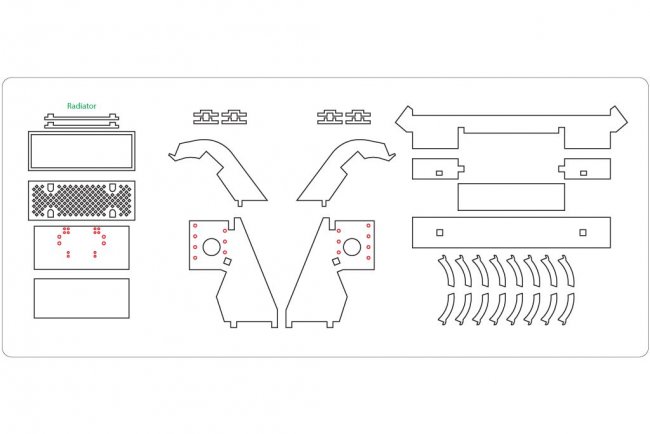


Собирает переднюю часть.



После размещения передней брони корпус закончен. Другие части будут прикручены или наклеены на него без склеивания
Шаг четвертый: крыша и перископ
Эта часть является съемной частью. Это сделано для того, был доступ к внутренней части. Рычаг перископа устанавливается в конце крыши. Перископ размещается на крыше, но не приклеивается к ней.


Шаг пятый: боковая часть
На боковина устанавливаются рычаги подвесок. Она привинчена к двойному дну винтами 15 мм с помощью 4 гаек, которые были закреплены в первом шаге.




Шаг шестой: подвеска
Собирает и устанавливает узлы подвески. Все шаги подробно отражены на фотографиях. На концы пружин наносить немного клея для фиксации. Внутрь пружин устанавливает отрезки зубочисток. Это не даст пружинам выскочить.

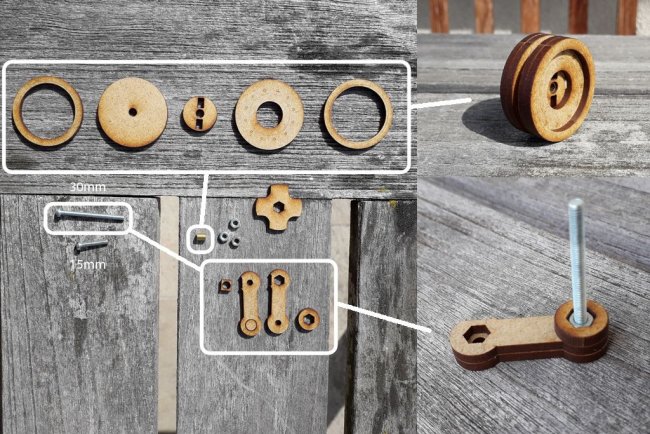


Собирает и устанавливает переднее нижнее колесо. Внутри ступицы колеса устанавливается латунная трубка и винт 20 мм. Затем ступица закрывается заглушкой.
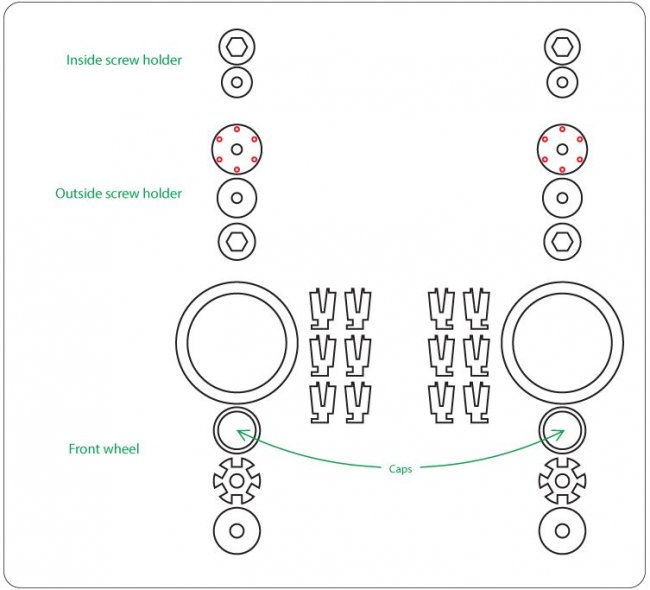

Собирает и устанавливает вернее колесо.


Собирает и устанавливает ведущие колеса. Эти колеса будут соединены с двигателями установленными в баке танка.


Устанавливает заглушки на колеса.

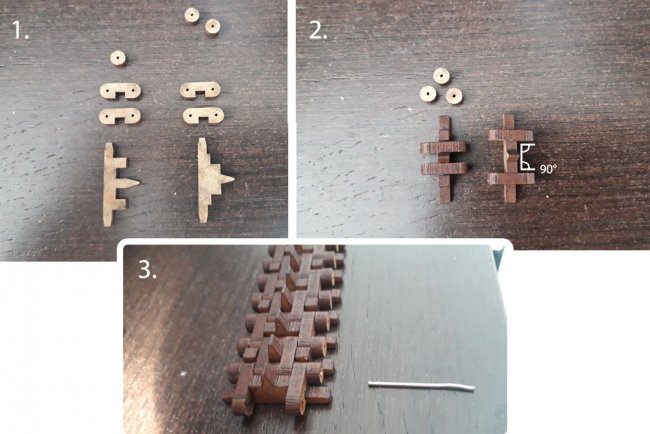
Шаг седьмой: гусеничная лента
Собирает гусеничную ленту. Траки скрепляются друг с другом с помощью тонкой проволоки. По бокам проволока фиксируется заглушками.
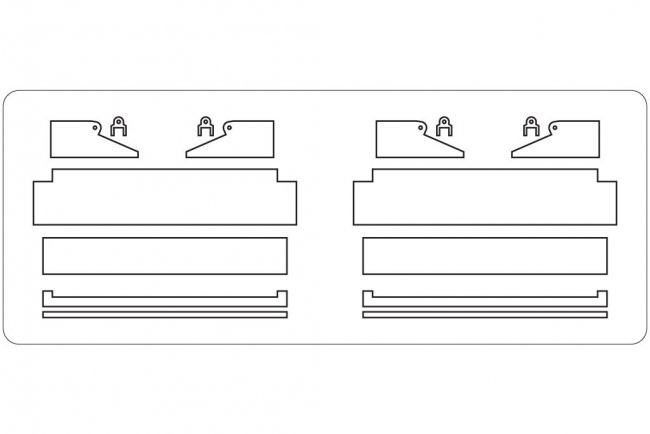
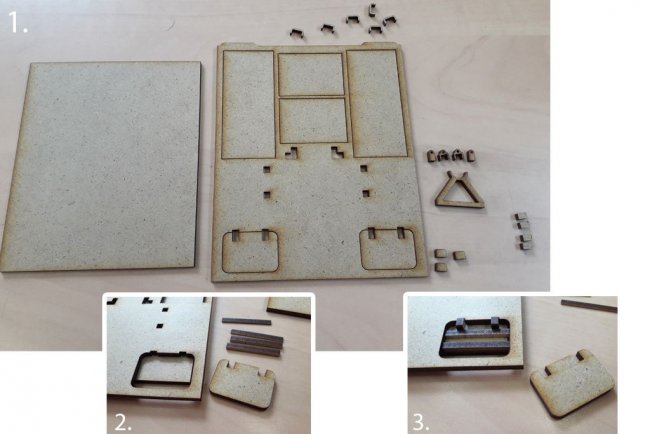
Шаг восьмой: грязезащита и ящик
Устанавливает щитки. Передняя часть щитков подвижна и ее можно поднять.



Устанавливает ящик. В качестве петель устанавливаются кусочки проволоки.

Шаг девятый: задняя часть
Эта часть находится за башней и она будет закрывать всю электронику.


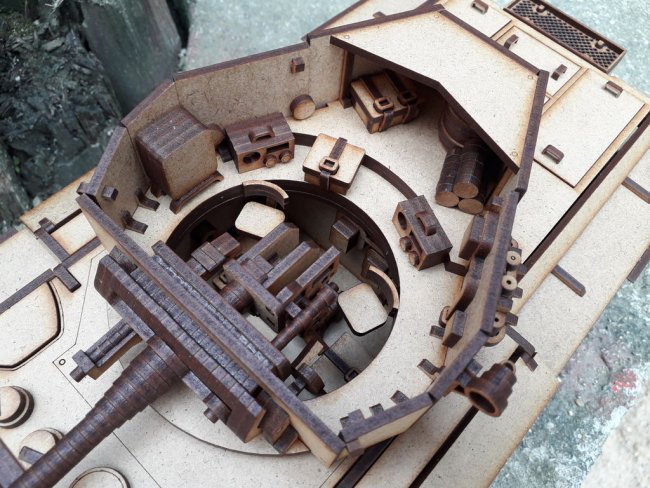
Шаг десятый: башня
Собирает верхнюю часть башни и боковые стенки.




Приклеивает крепление пушки.



Устанавливает внутреннее крепление и механизм управления пушкой.

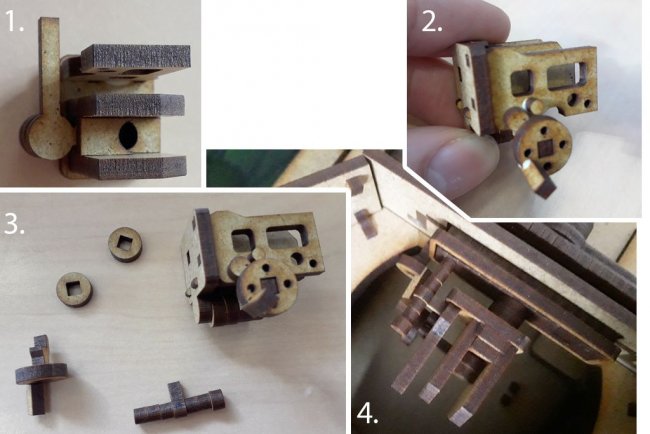
Шаг одиннадцатый: пушка
Собирает пушку.Основой пушки служит металлический стержень. На него нанизываются остальные детали.


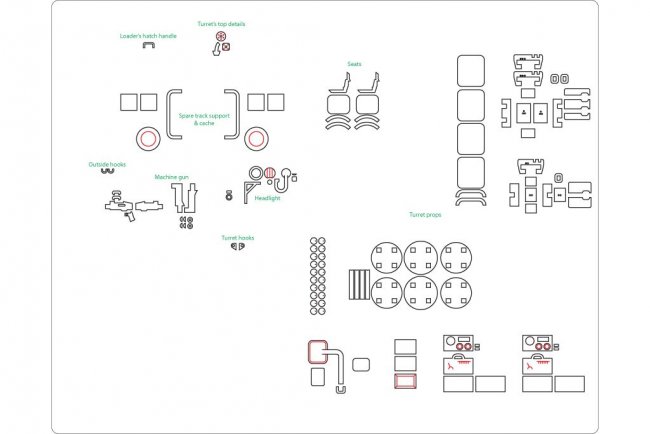
Шаг двенадцатый: мелкие детали
Закрепляет мелкие детали танка.
Внутри с левой стороны сиденье и пулемет, снаружи ствол пулемета.
Справа на месте водителя: сиденье, рычаги управления и педали, люк.
Снаружи: крюки, фары, ящики, боеприпасы, трос и т.д.



За башней закрепляет бак под воду, внутри башни рацию.


Шаг тринадцатый: электроника
Устанавливает двигатели. Производит монтаж электронной части согласно схемы.

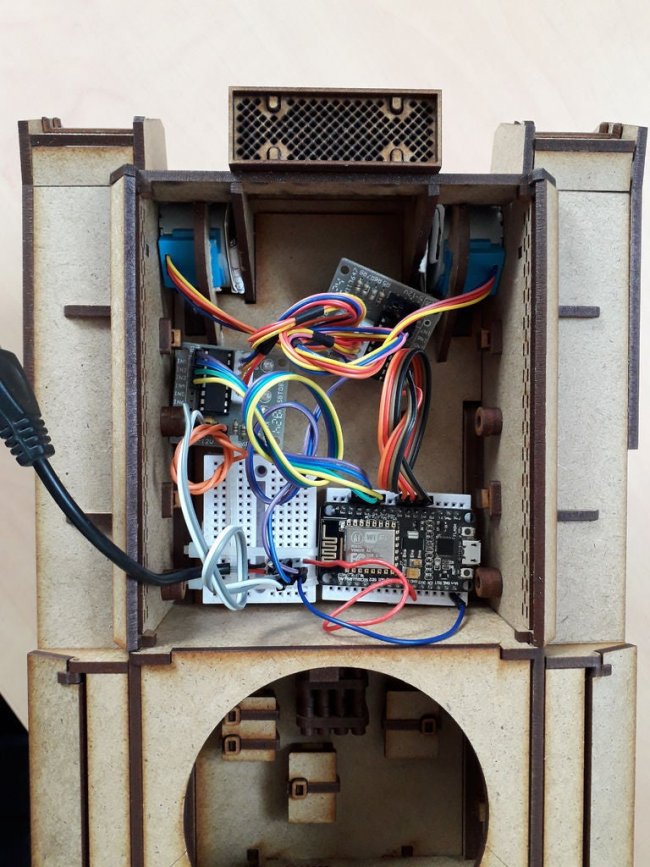
Для беспроводного управления выбрал контроллер NodeMCU. Управление моделью осуществляется через NodeMCU и приложение Blynk (доступно на Android / iOS). Это приложение предоставляет полностью настраиваемый HUD для управления с любого Arduino или iOS телефона через WiFi.
Итак, после установки приложения, первое, что нужно сделать, это создать учетную запись.
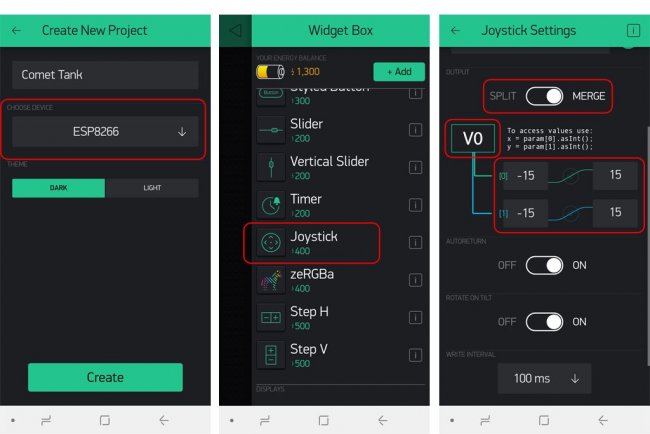
Создайте новый проект и назначьте ESP8266 (микросхему NodeMCU) в качестве микроконтроллера и выставьте режим WiFi .
Как только вы впервые увидите свой HUD, создайте джойстик. Информацию о джойстике отправьте на виртуальный вывод V0 узла.
После того, как вы создали джойстик, нажмите на него, чтобы открыть его настройки. В позициях X и Y установите диапазон от -15 до 15.
Установите библиотеки.
Во-первых, загрузите библиотеку Stepper2 здесь: https://github.com/udivankin/Stepper2
Эта библиотека - хороший вариант для дешевых шаговых двигателей, таких как тот, который мастер использовал. Он лучше управляет фазами двигателя и обеспечивает лучший крутящий момент. После загрузки .zip- файла установите его из программного обеспечения Arduino: Sketch> Include Library> Add .ZIP Library ... и выберите его.
Затем, если вы никогда ранее не прошивали NodeMCU, вам нужен компьютер для его распознавания. В Arduino IDE есть менеджер плат, на котором установлены правильные драйверы.
Скопируйте следующую строку:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonОткройте настройки и вставьте их в URL-адреса. Сохраните настройки и перейдите к менеджеру контроллеров в Tools>Board>Boards Manager. Плата ESP8266 должна присутствовать в конце списка. Мастер выбрал версию 2.5.0 с IDE в 1.8.9 .
Также нужна библиотека Blynk, которую можно найти в Sketch>Include Library>Manage libraries ... и затем найти Blynk в поле поиска.
Зайдите в настройки проекта и отправьте на свой адрес токен, представляющий собой большую строку, позволяющую вашему телефону распознавать NodeMCU при включении. Скопируйте токен из вашей недавно полученной почты и вставьте его в массив auth.
Теперь можно установить прошивку.
Все готово, теперь вы можете наслаждаться своей работой.